|
Применение 32-разрядных микроконтроллеров NEC семейства V850ES/Sx2 в схемах источников электропитания
Значительная часть источников питания в настоящее время конструируется на основе схем импульсных преобразователей напряжения или тока. В первую очередь это обусловлено более высоким коэффициентом полезного действия (КПД) таких устройств по сравнению с линейными источниками питания, а также более высокими удельными характеристиками: меньшей массой и физическим объемом источника при большей передаваемой мощности.
Наиболее популярные топологии базовых схем и их управляющие сигналы показаны на рис. 1, 2 и 3. В преобразователях постоянного напряжения, основу которых составляют схемы понижающего, повышающего и инвертирующего преобразователей (рис. 1), регулирование и стабилизация выходного напряжения или тока осуществляется путем модуляции тока дросселя (реактора) с помощью двухпозиционного ключевого элемента (на практике обычно это либо транзистор и диод, как показано на рис. 1, либо два транзистора). Путем изменения соотношения времени замкнутого (tи ) и разомкнутого (tп) состояний ключевого элемента осуществляется требуемое преобразование входных напряжения и тока.
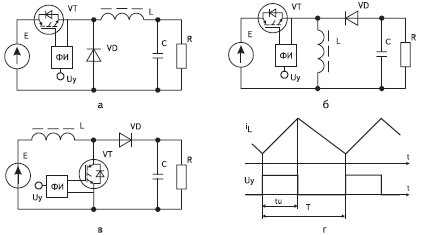
Рис. 1. Преобразователи постоянного напряжения (a — понижающий, б — инвертирующий, в — повышающий, г — зависимость тока индуктивности от управляющего напряжения)
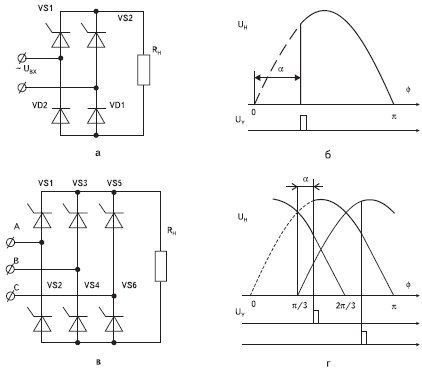
Рис. 2. Преобразователи переменного напряжения в постоянное — выпрямители (а — однофазный, в — трехфазный, б и г — зависимость напряжения нагрузки от напряжения управления)
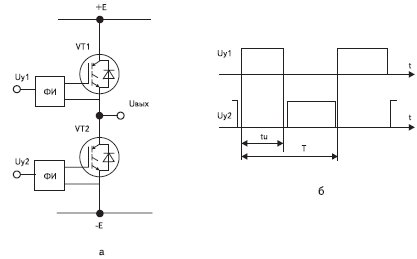
Рис. 3. Двухпозиционный ключевой элемент и диаграммы его работы
Чаще всего используется модуляция на фиксированной частоте работы ключа, известная как ШИМ — широтно-импульсная модуляция (T=const, tи=var ). Реже применяются частотная (ЧИМ) и комбинированная (ЧШИМ) виды модуляций [1, 2].
В большинстве случаев от системы управления требуется сформировать ряд синхронизированных либо по отношению друг к другу, либо к внешнему сигналу последовательностей импульсов, в которых частота, длительность импульса, паузы или взаимного фазового сдвига изменяется в функции управляющего воздействия.
Микроконтроллеры широко применяются в системах управления источниками питания, причем, в зависимости от требуемой частоты работы силовых ключей, либо весь регулятор строится на основе контроллера, либо он работает в связке с аналоговым ШИМ-контроллером, выступая в качестве «медленной» коррекции в контуре обратной связи. Обобщенная структурная схема первого способа реализации цифрового регулятора показана на рис. 4. В зависимости от способа организации обратной связи (по отклонению, по возмущению или комбинированный способ) в системе присутствует ряд датчиков (PA, PV, PT и др.), нормированный сигнал с которых поступает на входы аналого-цифрового преобразователя (АЦП) управляющего микроконтроллера. С другой стороны, задающее воздействие (Uоп) поступает в микроконтроллер от внешнего задатчика, либо через один из входов АЦП, либо через один из интерфейсов (UART, CAN, SPI и пр.), в случае дистанционного управления. Далее на основе сигналов обратной связи и управляющего воздействия вычисляется отклонение или ошибка выходной величины. После цифровой коррекции и с помощью модулей ШИМ на основе таймеров-счетчиков формируются выходные импульсные последовательности, которые через формирователи импульсов (ФИ) или драйверы управляют работой силовых ключей.
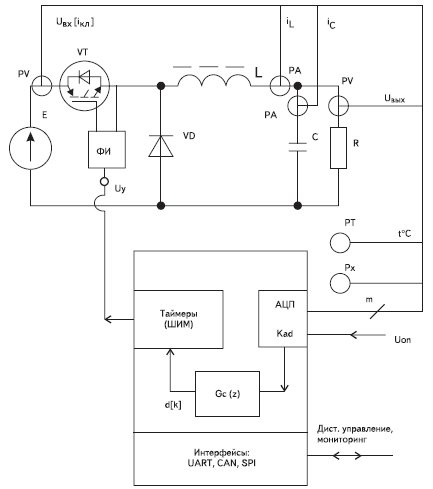
Рис. 4. Обобщенная структурная схема цифрового регулятора на основе микроконтроллера
Наличие цифровой коррекции объясняется необходимостью обеспечения заданных статических и динамических характеристик преобразователя при условии сохранения устойчивости работы преобразователя. С точки зрения реализации цифровой коррекции передаточной характеристики микроконтроллер может быть представлен в виде дискретного фильтра, который осуществляет преобразование входной последовательности чисел (или, в случае многих датчиков и переменных — ряда последовательностей) в выходную (k=0, 1, 2, …).
Если не учитывать квантование по уровню, то есть пренебречь конечностью разрядов аналого-цифрового преобразователя и ограничиться линейными операциями, то разностное уравнение (условную программу микроконтроллера) можно представить в следующем виде:

Рассмотрим в качестве примера реализацию цифрового ПИД-регулятора. Непрерывная передаточная функция такого регулятора описывается следующим выражением:
где Kp, Ki, Kd — коэффициенты пропорциональной, интегральной и дифференциальной частей соответственно. Цифровая реализация этого регулятора получается путем замены операций дифференцирования и интегрирования разностными уравнениями. Проведя необходимые математические преобразования, получаем передаточную функцию цифрового ПИД-регулятора в следующем виде:

На основании передаточной функции легко получить разностное уравнение, которое описывает алгоритм работы цифрового ПИД-регулятора:
Легко видеть, что выражение (4) является частным случаем общего выражения (1).
Обобщая, можно сказать, что для реализации цифрового регулятора в современных источниках питания от микроконтроллера требуются: развитая система ШИМ-модулей на основе таймеров, скоростной аналого-цифровой преобразователь и высокая скорость выполнения базовых математических операций. Всеми этими особенностями обладают современные 32-разрядные микроконтроллеры. Нами были рассмотрены семейство V850ES/Sx2 (S_Series) от NEC и семейство AT91SAM7S с ядром ARM от Atmel. Общая информация о микроконтроллерах семейства V850ES/Sx2 и AT91SAM7S приведена в таблице 1.
Таблица 1. Общая информация о микроконтроллерах семейств V850ES/Sx2 и AT91SAM7S
| Ядро/ семейство |
Наименование |
Flash-память прог-рамм, Кбайт |
ОЗУ, Кбайт |
Произво-дительность во Flash/ MIPS, МГц |
Напряжение питания, В |
Корпус |
Периферия |
| V850ES/ SG2 |
µPD70F3261 |
384 |
32 |
29/20 |
2,85–3,6 |
LQFP100 QFP100 |
- |
84I/O;5CSIB;3UART; I2C; Data8/Adress16; 10TIM; PWM9x16; ADC12x10bit,
DAC2x8bit; LIN, 4-ch DMA; LVI; CM; SV; OCD |
| µPD70F3263 |
640 |
48 |
| µPD70F3281 |
384 |
32 |
CAN |
| µPD70F3283 |
640 |
48 |
|
| V850ES/ SJ2 |
µPD70F3264 |
384 |
32 |
29/20 |
2,85–3,6 |
TQFP144 |
- |
128I/O;6CSI;4UART; I2C; Data8/Adress16; 13TIM; PWM12x16; ADC16x10bit, DAC2x8bit;
LIN, 4-ch DMA; LVI; CM; SV; OCD |
| µPD70F3266 |
640 |
48 |
| µPD70F3284 |
384 |
32 |
CAN |
| µPD70F3286 |
640 |
48 |
| µPD70F3288 |
640 |
48 |
2CAN |
| ARM7TDMI |
AT91SAM7S321 |
32 |
8 |
27/30 |
1,65–1,95/ 3,0–3,6 |
LQFP64 |
32I/O; 4TIM; 1SPI; 1UART; ADC8x10bit; USB; 2-Wire; SSC |
| AT91SAM7S64 |
64 |
16 |
| AT91SAM7S128 |
128 |
32 |
| AT91SAM7S256 |
256 |
64 |
Краткие обозначения:
- ADC — аналого-цифровой преобразователь
- CM — узел слежения за опорной частотой
- CSIB — 3-проводной последовательный интерфейс (аналог SPI)
- DMA — контроллер прямого доступа к памяти
- I/O — порты ввода-вывода
- LIN — интерфейс LIN
- LVI — индикатор снижения напряжения питания
- OCD — возможность JTAG-отладки
- PWM — таймеры, работающие в режиме ШИМ
- SV — одно напряжение программирования (возможность самопрограммирования)
- TIM — Ообщее количество таймеров
- UART — стандартный асинхронный последовательный порт
Предпочтение было отдано микроконтроллерам NEC, в основном, по двум причинам. Во-первых, микроконтроллеры ARM ориентированы на работу в ОЗУ, следовательно, менее устойчивы к воздействию сильных электромагнитных полей, характерных для силовой электроники. В отличие от ARM7, ядро V850ES в рассматриваемых микроконтроллерах принципиально исполняет команды, записанные во Flash-памяти, следовательно, является потенциально более стабильным.
Во-вторых, микроконтроллеры NEC имеют более развитую и интеллектуальную структуру таймеров.
В состав микроконтроллеров входят: девять 16-разрядных таймеров, 10-разрядный аналого-цифровой преобразователь со временем преобразования 2,6 мкс, полный набор последовательных интерфейсов (CAN, UART, SPI, IIC). Большинство математических операций выполняются за один такт (знаковое умножение 1–5 тактов).
Аналогичные характеристики имеют семейства V850ES/Sx3 и V850ES/Jx2. Микроконтроллеры V850ES/Sx3 могут работать на частотах до 32 МГц и имеют объем Flash-памяти от 256 кбайт до 1 Мбайт, а особенностью V850ES/Jx2 является малая цена, отсутствие интерфейса CAN и объем Flash-памяти от 128 до 640 кбайт.
Легко видеть, что разнообразие функций, режимов и количество таймеров позволяют реализовать большинство управляющих сигналов традиционных схем источников питания. Для иллюстрации этого на кафедре промышленной и медицинской электроники Томского политехнического университета при использовании Demonstration Kit EB-V850ES/SG2-EE был разработан прототип преобразователя постоянного напряжения понижающего типа со следующими характеристиками: частота работы ключевого элемента — 20 кГц; входное напряжение — 15 В, выходное напряжение (ток) — 10 В (1–2 А). Был реализован П-регулятор. Диаграммы выходного тока и напряжения при скачкообразном изменении нагрузки показаны на рис. 5.
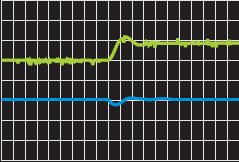
Рис. 5. Верхний луч — ток дросселя, 1 А/дел, ноль в начале координат; нижний луч — напряжение на нагрузке, 5 В/дел., ноль в –3 деления. Временная ось — 2,5 мс/дел
В качестве средств разработки для микроконтроллеров семейства S_Series могут исполь-зоваться: оценочный комплект EB-V850ES/SG2-EE, JTAG-отладчик QB-V850MINI-EE и полнофункциональный эмулятор QB-V850ESSX2-ZZZ-EE.
Несколько слов об оценочном комплекте EB-V850ES/SG2-EE. Его внешний вид приведен на рис. 6.

Рис. 6. Оценочный комплект EB-V850ES/SG2-EE
Краткие технические характеристики:
- Семейство микроконтроллеров: S_Series (V850ES/Sx2).
- Микроконтроллер: uPD70F3281YGC-8EU.
- Интерфейс CAN: 1 канал.
- Flash-память: 384 кбайт.
- ОЗУ: 32 кбайт.
- Комплектность:
- источник питания 12 В;
- кабель UART;
- программное обеспечение.
В заключение можно сказать, что 32-разрядные микроконтроллеры семейства V850ES/Sx2 благодаря своим отличным характеристикам позволяют легко и быстро реализовать достаточно сложные алгоритмы цифрового управления источниками питания.
Литература
- Четти П. Проектирование ключевых источников электропитания / Пер. с англ. М.: Энергоатомиздат. 1990.
- Севернс Р., Блум Г. Импульсные преобразователи постоянного напряжения для систем вторичного электропитания / Пер. с англ. под ред. Л. Е. Смольникова. М.: Энергоатомиздат. 1988.
- Багинский Б. А. Бестрансформаторные преобразователи переменного напряжения в постоянное. Томск: Изд-во Том. ун-та. 1990.
- Цыпкин Я. З. Основы теории автоматических систем. М.: Наука. 1977.
Евгений БУРКИН
Геннадий Горюнов
|